Jak korzystać z procesorów?
Procesor to moduł wykorzystujący modele AI do analizy danych z kamer lub nagrań wideo oraz wykonywania określonych zadań, takich jak zapisywanie klatek, monitorowanie czy sterowanie systemami robotycznymi w czasie rzeczywistym.
Frame saver (zapisywanie klatek)
Aby dodać procesor, przejdź do sekcji Processory i kliknij Dodaj procesor.
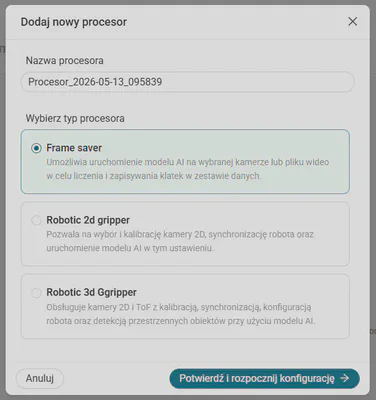
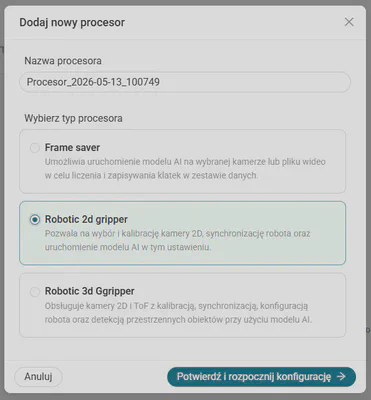
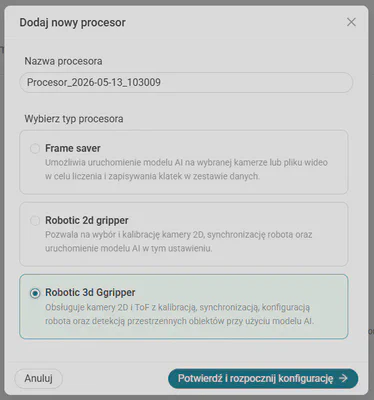
Dodaj nazwę procesora i wybierz jego typ. Najpierw wybierzemy Frame saver. Kliknij Potwierdź i rozpocznij konfigurację.
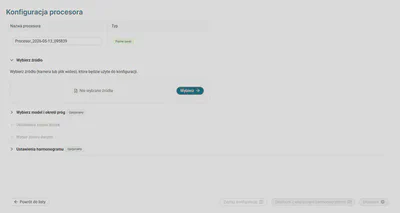
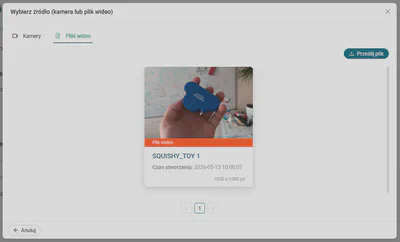
Wybierz źródło. Możesz wybrać kamerę lub plik wideo, który zostanie użyty do konfiguracji. W tym przykładzie użyjemy wideo.
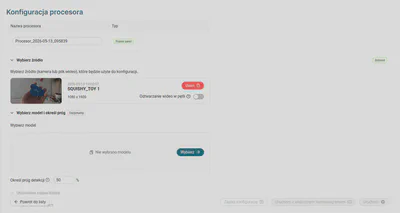
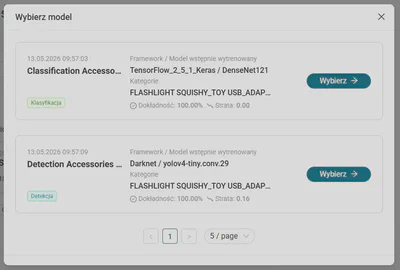
Wybierz model i ustaw próg (dotyczy tylko modeli detekcyjnych). Użyjemy modelu detekcyjnego.
Skonfiguruj ustawienia zapisywania klatek. Możesz określić sposób przechwytywania klatek, wybierając interwał czasowy lub zapis co określoną liczbę klatek. Wybierz format wyjściowy (JPG lub PNG) oraz dostosuj rozmiar klatek, wybierając proporcje obrazu albo ustawiając szerokość i wysokość.
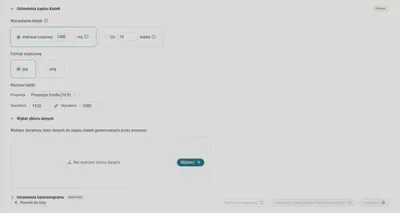
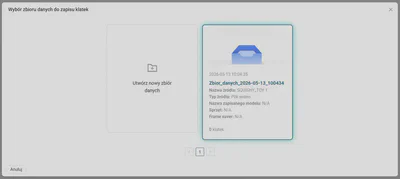
Wybierz docelowy zbiór danych, do którego będą zapisywane klatki generowane przez procesor. Kliknij Wybierz i utwórz nowy dataset.
Opcjonalnie możesz ustawić harmonogram określający, kiedy procesor ma być uruchamiany.
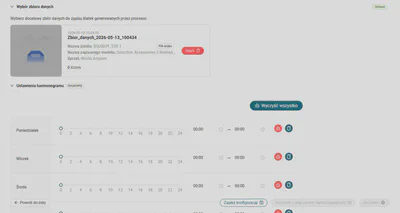
Kliknij Zapisz konfigurację, a następnie Uruchom lub Uruchom z włączonym harmonogramem.

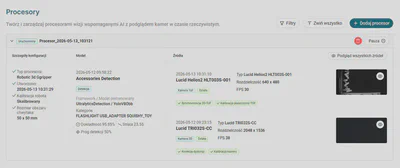
W widoku Procesory możesz wstrzymać procesor, usunąć go lub edytować, gdy jest wstrzymany.
Robotic 2d gripper
Kliknij Dodaj procesor i wybierz Robotic 2d gripper. Następnie kliknij Potwierdź i rozpocznik konfigurację.
Wybierz źródło. Możesz użyć kamery lub pliku wideo do konfiguracji. W tym przykładzie użyjemy kamery.
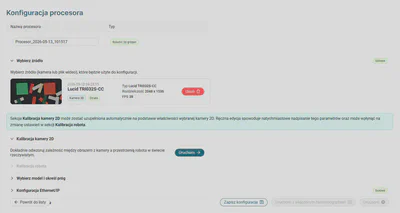
Kolejnym krokiem jest kalibracja kamery 2D, która pozwala precyzyjnie odwzorować zależność między płaszczyzną obrazu kamery a rzeczywistą przestrzenią robota. Możesz wybrać sposób przeprowadzenia kalibracji:
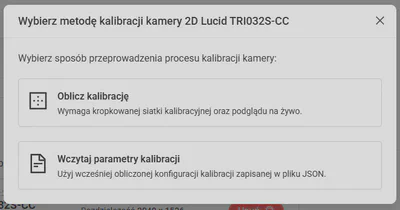
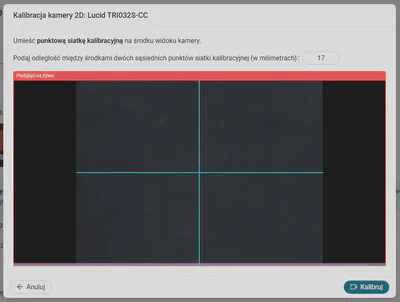
- Oblicz kalibrację — wymaga kropkowanej siatki kalibracyjnej oraz podglądu na żywo.
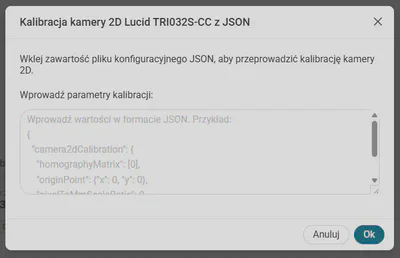
- Wczytaj parametry kalibracji — użyj wcześniej obliczonej konfiguracji kalibracji zapisanej w pliku JSON.
Następnie wykonaj ręczną kalibrację robota za pomocą panelu operatorskiego. Po zakończeniu kliknij Oznacz jako wykonane.
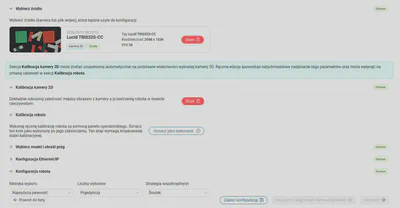
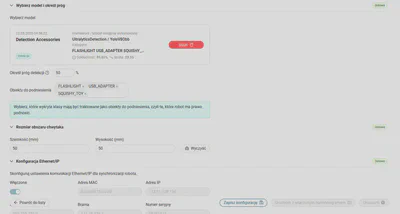
Wybierz model, ustaw próg (tylko dla modeli detekcyjnych) oraz wybierz obiekty do podniesienia. Użyjemy modelu detekcyjnego.
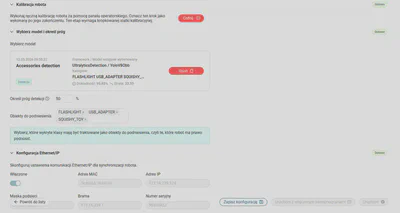
Skonfiguruj ustawienia komunikacji Ethernet/IP dla synchronizacji robota i opcjonalnie możesz ustaw harmonogram określający, kiedy procesor ma być uruchamiany. Kliknij Zapisz konfigurację, a następnie Uruchom lub Uruchom z włączonym harmonogramem.
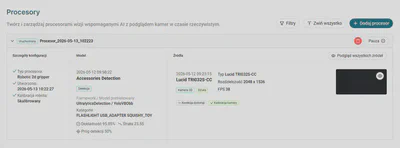
W widoku Procesory możesz wstrzymać procesor, usunąć go lub edytować, gdy jest wstrzymany.
Robotic 3d gripper
Kliknij Dodaj procesor i wybierz Robotic 3d gripper. Następnie kliknij Potwierdź i rozpocznij konfigurację.
Wybierz źródło. Możesz użyć kamery lub pliku wideo do konfiguracji. W tym przykładzie użyjemy kamery.
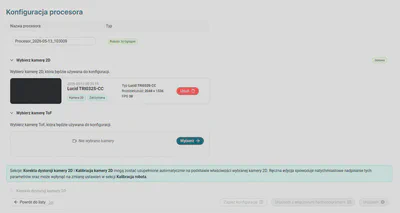
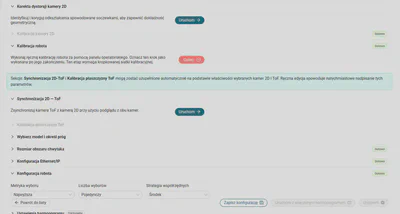
Wybierz kamerę ToF i następnie wykonaj korektę dystorsji kamery 2D.
Wybierz sposób zastosowania korekcji zniekształceń:
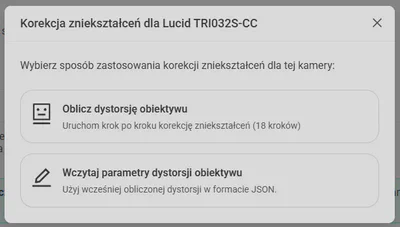
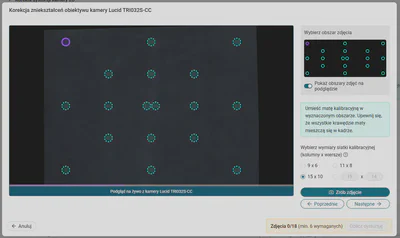
- Oblicz dystorsję obiektywu - Uruchom krok po kroku korekcję zniekształceń
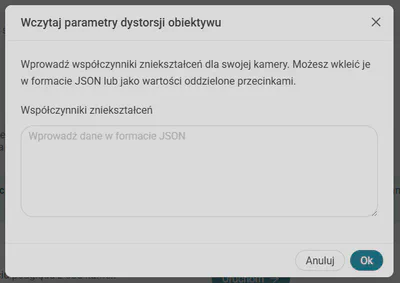
- Wczytaj parametry dystorsji obiektywu - Użyj wcześniej obliczonej dystorsji w formacie JSON
Następnie wykonaj ręczną kalibrację robota za pomocą panelu operatorskiego. Po zakończeniu kliknij Oznacz jako wykonane.
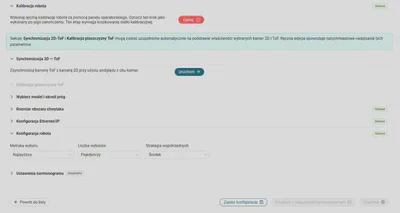
Zsynchronizuj kamerę ToF z kamerą 2D przy użyciu podglądu z obu kamer. Wybierz w jaki sposób chcesz przeprowadzić proces synchronizacji kamer:
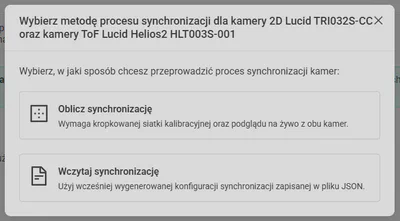
- Oblicz synchronizację - Wymaga kropkowanej siatki kalibracyjnej oraz podglądu na żywo z obu kamer.

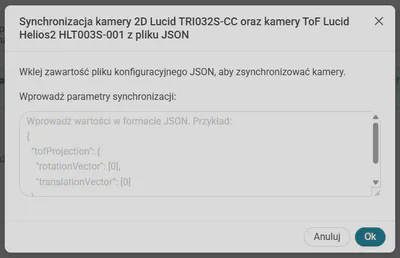
- Wczytaj synchronizację - Użyj wcześniej wygenerowanej konfiguracji synchronizacji zapisanej w pliku JSON
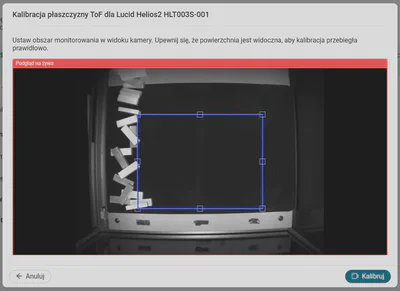
Skalibruj płaszczyznę ToF. Wybierz sposób przeprowadzenia kalibracji:
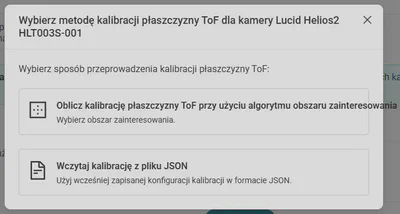
- Oblicz kalibrację płaszczyzny ToF przy użyciu algorytmu obszaru zainteresowania - Wybierz obszar zainteresowania
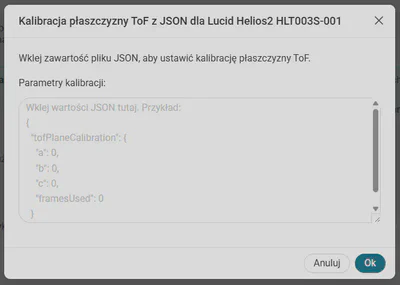
- Wczytaj kalibrację z pliku JSON - Użyj wcześniej zapisanej konfiguracji kalibracji w formacie JSON
Wybierz model, ustaw próg (tylko dla modeli detekcyjnych) oraz wybierz obiekty do podniesienia. Użyjemy modelu detekcyjnego. Ustaw również rozmiar obszaru chwytaka i Skonfiguruj ustawienia komunikacji Ethernet/IP dla synchronizacji robota. Opcjonalnie możesz ustaw harmonogram określający, kiedy procesor ma być uruchamiany.
W widoku Procesory możesz wstrzymać procesor, usunąć go lub edytować, gdy jest wstrzymany.